Tutorial 3: Undistort frames and overlay annotations

Filled notebook:
 Author: Xizi Wang
Author: Xizi Wang
Cameras on the Aria glasses and GoPro cameras might have lenses that can cause distortions. For example, cameras on the Aria glasses all have fisheye lenses, and spherical camera model are much better approximations for these glasses. Some of the annotations in the EgoExo4D dataset are done on the undistorted frames. Thus, we need to undistort the frames first, then we could overlay the 2D annotations on the frames. In this tutorial, we provide a step-by-step guide on undistorting the egocentric and exocentric frames, and overlay the annotations on them.
1. Prerequisites and Imports
%matplotlib inline
import cv2
import matplotlib.pyplot as plt
import numpy as np
import math
from matplotlib import rcParams
from projectaria_tools.core import mps
from projectaria_tools.core import data_provider
from projectaria_tools.core import calibration
#from projectaria_tools.core.calibration import CameraCalibration, KANNALA_BRANDT_K3
rcParams["figure.figsize"] = 16, 32
import json
import os
import random
import av
import pandas as pd
from PIL import Image, ImageDraw, ImageFont
Next we define some necessary utility functions for retrieving pose metadata and drawing functions. These are the same as the utility functions in the pose tutorial.
# Loads dataframe at target path to csv
def load_csv_to_df(filepath: str) -> pd.DataFrame:
with open(filepath, "r") as csv_file:
return pd.read_csv(csv_file)
# color palette for drawing the keypoints
palette = np.array(
[
[255, 128, 0],
[255, 153, 51],
[255, 178, 102],
[230, 230, 0],
[255, 153, 255],
[153, 204, 255],
[255, 102, 255],
[255, 51, 255],
[102, 178, 255],
[51, 153, 255],
[255, 153, 153],
[255, 102, 102],
[255, 51, 51],
[153, 255, 153],
[102, 255, 102],
[51, 255, 51],
[0, 255, 0],
[0, 0, 255],
[255, 0, 0],
[255, 255, 255],
]
)
# retrieve the body keypoints and skeleton
def get_body_metadata():
keypoints_map = [
{"label": "Nose", "id": "fee3cbd2", "color": "#f77189"},
{"label": "Left-eye", "id": "ab12de34", "color": "#d58c32"},
{"label": "Right-eye", "id": "7f2g1h6k", "color": "#a4a031"},
{"label": "Left-ear", "id": "mn0pqrst", "color": "#50b131"},
{"label": "Right-ear", "id": "yz89wx76", "color": "#34ae91"},
{"label": "Left-shoulder", "id": "5a4b3c2d", "color": "#37abb5"},
{"label": "Right-shoulder", "id": "e1f2g3h4", "color": "#3ba3ec"},
{"label": "Left-elbow", "id": "6i7j8k9l", "color": "#bb83f4"},
{"label": "Right-elbow", "id": "uv0wxy12", "color": "#f564d4"},
{"label": "Left-wrist", "id": "3z4ab5cd", "color": "#2fd4aa"},
{"label": "Right-wrist", "id": "efgh6789", "color": "#94d14f"},
{"label": "Left-hip", "id": "ijklmnop", "color": "#b3d32c"},
{"label": "Right-hip", "id": "qrstuvwx", "color": "#f9b530"},
{"label": "Left-knee", "id": "yz012345", "color": "#83f483"},
{"label": "Right-knee", "id": "6bc7defg", "color": "#32d58c"},
{"label": "Left-ankle", "id": "hijk8lmn", "color": "#3ba3ec"},
{"label": "Right-ankle", "id": "opqrs1tu", "color": "#f564d4"},
]
# pyre-ignore
pose_kpt_color = palette[[16, 16, 16, 16, 16, 9, 9, 9, 9, 9, 9, 0, 0, 0, 0, 0, 0]]
skeleton = [
[16, 14],
[14, 12],
[17, 15],
[15, 13],
[12, 13],
[6, 12],
[7, 13],
[6, 7],
[6, 8],
[7, 9],
[8, 10],
[9, 11],
[2, 3],
[1, 2],
[1, 3],
[2, 4],
[3, 5],
[4, 6],
[5, 7],
]
return keypoints_map, skeleton, pose_kpt_color
# retrieve the hand keypoints and skeleton
def get_hands_metadata():
keypoints_map = [
{"label": "Right_Wrist", "id": "fee3cbd2", "color": "#f77189"},
{"label": "Right_Thumb_1", "id": "yz012345", "color": "#83f483"},
{"label": "Right_Thumb_2", "id": "6bc7defg", "color": "#32d58c"},
{"label": "Right_Thumb_3", "id": "hijk8lmn", "color": "#3ba3ec"},
{"label": "Right_Thumb_4", "id": "opqrs1tu", "color": "#f564d4"},
{"label": "Right_Index_1", "id": "ab12de34", "color": "#d58c32"},
{"label": "Right_Index_2", "id": "7f2g1h6k", "color": "#a4a031"},
{"label": "Right_Index_3", "id": "mn0pqrst", "color": "#50b131"},
{"label": "Right_Index_4", "id": "9vwxyzab", "color": "#32d58c"},
{"label": "Right_Middle_1", "id": "yz89wx76", "color": "#34ae91"},
{"label": "Right_Middle_2", "id": "5a4b3c2d", "color": "#37abb5"},
{"label": "Right_Middle_3", "id": "e1f2g3h4", "color": "#3ba3ec"},
{"label": "Right_Middle_4", "id": "cdefgh23", "color": "#3ba3ec"},
{"label": "Right_Ring_1", "id": "efgh6789", "color": "#94d14f"},
{"label": "Right_Ring_2", "id": "ijklmnop", "color": "#b3d32c"},
{"label": "Right_Ring_3", "id": "qrstuvwx", "color": "#f9b530"},
{"label": "Right_Ring_4", "id": "ijkl4567", "color": "#bb83f4"},
{"label": "Right_Pinky_1", "id": "6i7j8k9l", "color": "#bb83f4"},
{"label": "Right_Pinky_2", "id": "uv0wxy12", "color": "#f564d4"},
{"label": "Right_Pinky_3", "id": "3z4ab5cd", "color": "#2fd4aa"},
{"label": "Right_Pinky_4", "id": "mnop8qrs", "color": "#f564d4"},
{"label": "Left_Wrist", "id": "fee3cbd2_left", "color": "#f77189"},
{"label": "Left_Thumb_1", "id": "yz012345_left", "color": "#83f483"},
{"label": "Left_Thumb_2", "id": "6bc7defg_left", "color": "#32d58c"},
{"label": "Left_Thumb_3", "id": "hijk8lmn_left", "color": "#3ba3ec"},
{"label": "Left_Thumb_4", "id": "opqrs1tu_left", "color": "#f564d4"},
{"label": "Left_Index_1", "id": "ab12de34_left", "color": "#d58c32"},
{"label": "Left_Index_2", "id": "7f2g1h6k_left", "color": "#a4a031"},
{"label": "Left_Index_3", "id": "mn0pqrst_left", "color": "#50b131"},
{"label": "Left_Index_4", "id": "9vwxyzab_left", "color": "#32d58c"},
{"label": "Left_Middle_1", "id": "yz89wx76_left", "color": "#34ae91"},
{"label": "Left_Middle_2", "id": "5a4b3c2d_left", "color": "#37abb5"},
{"label": "Left_Middle_3", "id": "e1f2g3h4_left", "color": "#3ba3ec"},
{"label": "Left_Middle_4", "id": "cdefgh23_left", "color": "#3ba3ec"},
{"label": "Left_Ring_1", "id": "efgh6789_left", "color": "#94d14f"},
{"label": "Left_Ring_2", "id": "ijklmnop_left", "color": "#b3d32c"},
{"label": "Left_Ring_3", "id": "qrstuvwx_left", "color": "#f9b530"},
{"label": "Left_Ring_4", "id": "ijkl4567_left", "color": "#bb83f4"},
{"label": "Left_Pinky_1", "id": "6i7j8k9l_left", "color": "#bb83f4"},
{"label": "Left_Pinky_2", "id": "uv0wxy12_left", "color": "#f564d4"},
{"label": "Left_Pinky_3", "id": "3z4ab5cd_left", "color": "#2fd4aa"},
{"label": "Left_Pinky_4", "id": "mnop8qrs_left", "color": "#f564d4"},
]
links = {
"fee3cbd2": ["ab12de34", "yz89wx76", "6i7j8k9l", "efgh6789", "yz012345"],
"ab12de34": ["7f2g1h6k"],
"7f2g1h6k": ["mn0pqrst"],
"mn0pqrst": ["9vwxyzab"],
"yz89wx76": ["5a4b3c2d"],
"5a4b3c2d": ["e1f2g3h4"],
"e1f2g3h4": ["cdefgh23"],
"6i7j8k9l": ["uv0wxy12"],
"uv0wxy12": ["3z4ab5cd"],
"3z4ab5cd": ["mnop8qrs"],
"efgh6789": ["ijklmnop"],
"ijklmnop": ["qrstuvwx"],
"qrstuvwx": ["ijkl4567"],
"yz012345": ["6bc7defg"],
"6bc7defg": ["hijk8lmn"],
"hijk8lmn": ["opqrs1tu"],
"fee3cbd2_left": [
"ab12de34_left",
"yz89wx76_left",
"6i7j8k9l_left",
"efgh6789_left",
"yz012345_left",
],
"ab12de34_left": ["7f2g1h6k_left"],
"7f2g1h6k_left": ["mn0pqrst_left"],
"mn0pqrst_left": ["9vwxyzab_left"],
"yz89wx76_left": ["5a4b3c2d_left"],
"5a4b3c2d_left": ["e1f2g3h4_left"],
"e1f2g3h4_left": ["cdefgh23_left"],
"6i7j8k9l_left": ["uv0wxy12_left"],
"uv0wxy12_left": ["3z4ab5cd_left"],
"3z4ab5cd_left": ["mnop8qrs_left"],
"efgh6789_left": ["ijklmnop_left"],
"ijklmnop_left": ["qrstuvwx_left"],
"qrstuvwx_left": ["ijkl4567_left"],
"yz012345_left": ["6bc7defg_left"],
"6bc7defg_left": ["hijk8lmn_left"],
"hijk8lmn_left": ["opqrs1tu_left"],
}
hand_dict = dict()
for index, kpt in enumerate(keypoints_map):
hand_dict[kpt["id"]] = index + 1
skeleton = list()
for start_point in links:
end_points = links[start_point]
for end_point in end_points:
start_index = hand_dict[start_point]
end_index = hand_dict[end_point]
skeleton.append([start_index, end_index])
klist = [0]
klist.extend([2] * 4)
klist.extend([4] * 4)
klist.extend([6] * 4)
klist.extend([8] * 4)
klist.extend([10] * 4)
klist.extend([0])
klist.extend([2] * 4)
klist.extend([4] * 4)
klist.extend([6] * 4)
klist.extend([8] * 4)
klist.extend([10] * 4)
pose_kpt_color = palette[klist]
return keypoints_map, skeleton, pose_kpt_color
def get_coords(annot):
pts = dict()
for k in annot:
atype = 1
if annot[k]["placement"] == "auto":
atype = 0
pts[k] = [annot[k]["x"], annot[k]["y"], atype]
return pts
def draw_skeleton(img, all_pts, skeleton):
draw = ImageDraw.Draw(img)
for item in skeleton:
left_index = item[0] - 1
right_index = item[1] - 1
left_pt = all_pts[left_index]
right_pt = all_pts[right_index]
if len(left_pt) == 0 or len(right_pt) == 0:
continue
draw.line([left_pt, right_pt], fill="white", width=10)
def draw_cross(img, x, y, color):
draw = ImageDraw.Draw(img)
# Circle parameters
center = (x, y) # Center of the cross
cross_length = 10 # Half-length of the cross arms
# Calculate the end points of the cross
left_point = (center[0] - cross_length, center[1])
right_point = (center[0] + cross_length, center[1])
top_point = (center[0], center[1] - cross_length)
bottom_point = (center[0], center[1] + cross_length)
# Draw the horizontal line
draw.line([left_point, right_point], fill=color, width=3)
# Draw the vertical line
draw.line([top_point, bottom_point], fill=color, width=3)
def draw_circle(img, x, y, color):
draw = ImageDraw.Draw(img)
# Circle parameters
center = (x, y) # Center of the circle
radius = 12 # Radius of the circle
# Calculate the bounding box of the circle
left_up_point = (center[0] - radius, center[1] - radius)
right_down_point = (center[0] + radius, center[1] + radius)
# Draw the circle with a black outline
draw.ellipse(
[left_up_point, right_down_point], outline=(255, 255, 255), fill=color, width=6
)
def draw_label(img, x, y, color, label):
draw = ImageDraw.Draw(img)
font = ImageFont.load_default(size=40)
# Circle parameters
center = (x + 20, y - 20) # Center of the circle
draw.text(center, label, fill=color, font=font)
def draw_skeleton_hands(img, all_pts, skeleton, ratio=1):
draw = ImageDraw.Draw(img)
for item in skeleton:
left_index = item[0] - 1
right_index = item[1] - 1
left_pt = all_pts[left_index]
right_pt = all_pts[right_index]
if len(left_pt) == 0 or len(right_pt) == 0:
continue
draw.line([left_pt, right_pt], fill="white", width=int(ratio * 4))
def draw_circle_hands(img, x, y, color, ratio=1):
draw = ImageDraw.Draw(img)
# Circle parameters
center = (x, y) # Center of the circle
radius = int(ratio * 8) # Radius of the circle
# Calculate the bounding box of the circle
left_up_point = (center[0] - radius, center[1] - radius)
right_down_point = (center[0] + radius, center[1] + radius)
# Draw the circle with a black outline
draw.ellipse(
[left_up_point, right_down_point],
outline=(255, 255, 255),
fill=color,
width=int(ratio * 4),
)
def draw_cross_hands(img, x, y, color, ratio=1):
draw = ImageDraw.Draw(img)
# Circle parameters
center = (x, y) # Center of the cross
cross_length = int(ratio * 8) # Half-length of the cross arms
# Calculate the end points of the cross
left_point = (center[0] - cross_length, center[1])
right_point = (center[0] + cross_length, center[1])
top_point = (center[0], center[1] - cross_length)
bottom_point = (center[0], center[1] + cross_length)
# Draw the horizontal line
draw.line([left_point, right_point], fill=color, width=int(ratio * 4))
# Draw the vertical line
draw.line([top_point, bottom_point], fill=color, width=int(ratio * 4))
def show_results(results):
for cam_name in results:
img = results[cam_name]
plt.figure(figsize=(40, 20))
plt.imshow(img)
plt.axis("off") # Hide the axes ticks
plt.title(f"{cam_name}", fontsize=20)
plt.savefig(f"{cam_name}.png")
#plt.show()
def get_viz(
pil_img,
keypoints_map,
ann,
skeleton,
pose_kpt_color,
annot_type="body",
is_aria=False,
):
pts = get_coords(ann)
ratio = 1
if is_aria:
ratio = 0.5
all_pts = []
for _, keypoints in enumerate(keypoints_map):
kpname = keypoints["label"].lower()
if kpname in pts:
x, y = pts[kpname][0], pts[kpname][1]
all_pts.append((x, y))
else:
all_pts.append(())
if annot_type == "body":
draw_skeleton(pil_img, all_pts, skeleton)
else:
draw_skeleton_hands(pil_img, all_pts, skeleton, ratio)
for index, keypoints in enumerate(keypoints_map):
kpname = keypoints["label"].lower()
if kpname in pts:
x, y, pt_type = pts[kpname][0], pts[kpname][1], pts[kpname][2]
color = tuple(pose_kpt_color[index])
if pt_type == 1:
if annot_type == "body":
draw_circle(pil_img, x, y, color)
else:
draw_circle_hands(pil_img, x, y, color, ratio)
else:
if annot_type == "body":
draw_cross(pil_img, x, y, color)
else:
draw_cross_hands(pil_img, x, y, color, ratio)
if annot_type == "body":
draw_label(pil_img, x, y, color, kpname)
else:
pass
return pil_img
# Video Utilities
def get_frame(video_local_path, frame_idx):
container = av.open(video_local_path)
frame_count = 0
for frame in container.decode(video=0):
if frame_count == frame_idx:
input_img = np.array(frame.to_image())
pil_img = Image.fromarray(input_img)
return pil_img
frame_count += 1
2. Undistortion functions
2.1 Aria Undistortion Utilities
def undistort_aria(image_array, provider, sensor_name, focal_length, size):
device_calib = provider.get_device_calibration()
src_calib = device_calib.get_camera_calib(sensor_name)
# create output calibration: a linear model of image size 512x512 and focal length 150
# Invisible pixels are shown as black.
dst_calib = calibration.get_linear_camera_calibration(
size, size, focal_length, sensor_name
)
# distort image
rectified_array = calibration.distort_by_calibration(
image_array, dst_calib, src_calib
)
return (
rectified_array,
dst_calib.get_principal_point(),
dst_calib.get_focal_lengths(),
)
2.2 GoPro Undistortion Utilities
def undistort_exocam(image, intrinsics, distortion_coeffs, dimension=(3840, 2160)):
DIM = dimension
dim2 = None
dim3 = None
balance = 0.8
# Load the distortion parameters
distortion_coeffs = distortion_coeffs
# Load the camera intrinsic parameters
intrinsics = intrinsics
dim1 = image.shape[:2][::-1] # dim1 is the dimension of input image to un-distort
# Change the calibration dim dynamically (bouldering cam01 and cam04 are verticall for examples)
if DIM[0] != dim1[0]:
DIM = (DIM[1], DIM[0])
assert (
dim1[0] / dim1[1] == DIM[0] / DIM[1]
), "Image to undistort needs to have same aspect ratio as the ones used in calibration"
if not dim2:
dim2 = dim1
if not dim3:
dim3 = dim1
scaled_K = (
intrinsics * dim1[0] / DIM[0]
) # The values of K is to scale with image dimension.
scaled_K[2][2] = 1.0 # Except that K[2][2] is always 1.0
# This is how scaled_K, dim2 and balance are used to determine the final K used to un-distort image. OpenCV document failed to make this clear!
new_K = cv2.fisheye.estimateNewCameraMatrixForUndistortRectify(
scaled_K, distortion_coeffs, dim2, np.eye(3), balance=balance
)
map1, map2 = cv2.fisheye.initUndistortRectifyMap(
scaled_K, distortion_coeffs, np.eye(3), new_K, dim3, cv2.CV_16SC2
)
undistorted_image = cv2.remap(
image,
map1,
map2,
interpolation=cv2.INTER_LINEAR,
borderMode=cv2.BORDER_CONSTANT,
)
return undistorted_image, new_K
def get_distortion_and_intrinsics(_raw_camera):
intrinsics = np.array(
[
[_raw_camera["intrinsics_0"], 0, _raw_camera["intrinsics_2"]],
[0, _raw_camera["intrinsics_1"], _raw_camera["intrinsics_3"]],
[0, 0, 1],
]
)
distortion_coeffs = np.array(
[
_raw_camera["intrinsics_4"],
_raw_camera["intrinsics_5"],
_raw_camera["intrinsics_6"],
_raw_camera["intrinsics_7"],
]
)
return distortion_coeffs, intrinsics
3. Overlay 2D annotations on undistorted frames
First, we locate the download folder of the EgoExo4D dataset and load necessary annotation files.
release_dir = "/datasets01/egoexo4d/v2/" # replace this with your download folder
annotation_dir = os.path.join(release_dir, "annotations/") # annotation folder
# load necessary annotation files
egoexo = {
"takes": os.path.join(release_dir, "takes.json"),
"captures": os.path.join(release_dir, "captures.json")
}
for k, v in egoexo.items():
egoexo[k] = json.load(open(v))
takes = egoexo["takes"]
captures = egoexo["captures"]
takes_by_uid = {x["take_uid"]: x for x in takes}
We then randomly sample one example take of playing violin. We also provide the take uid of some other takes as examples.
take_uid = "0bc47e29-e086-4726-b874-f89671366f06" # Violin
#take_uid = "23ff1c48-01ea-4d34-a38b-bc96e767b9b9" #Piano
#take_uid = "02715c86-e30c-4791-92b7-38b488e51aba" # Bike
take = [take for take in egoexo["takes"] if take["take_uid"] == take_uid]
take = take[0]
And load the camera intrinsics and extrinsics of the take. exo_traj_df reads in the exocentric cameras calibrations in csv format. The camera calibrations can be used for frame undistortion.
# Initialize exo cameras from calibration file
traj_dir = os.path.join(release_dir, take["root_dir"], "trajectory")
exo_traj_path = os.path.join(traj_dir, "gopro_calibs.csv")
exo_traj_df = load_csv_to_df(exo_traj_path)
exo_cam_names = list(exo_traj_df["cam_uid"])
ego_cam_names = [x["cam_id"] for x in take["capture"]["cameras"] if x["is_ego"] and x["cam_id"].startswith("aria")]
all_cams = ego_cam_names + exo_cam_names
ego_cam_name = ego_cam_names[0]
We also configure the VRS data provider.
## Configure the VRSDataProvider (interface used to retrieve Trajectory data)
ego_exo_project_path = os.path.join(release_dir, 'takes', take['take_name'])
aria_dir = os.path.join(release_dir, take["root_dir"])
aria_path = os.path.join(aria_dir, f"{ego_cam_name}.vrs")
vrs_data_provider = data_provider.create_vrs_data_provider(aria_path)
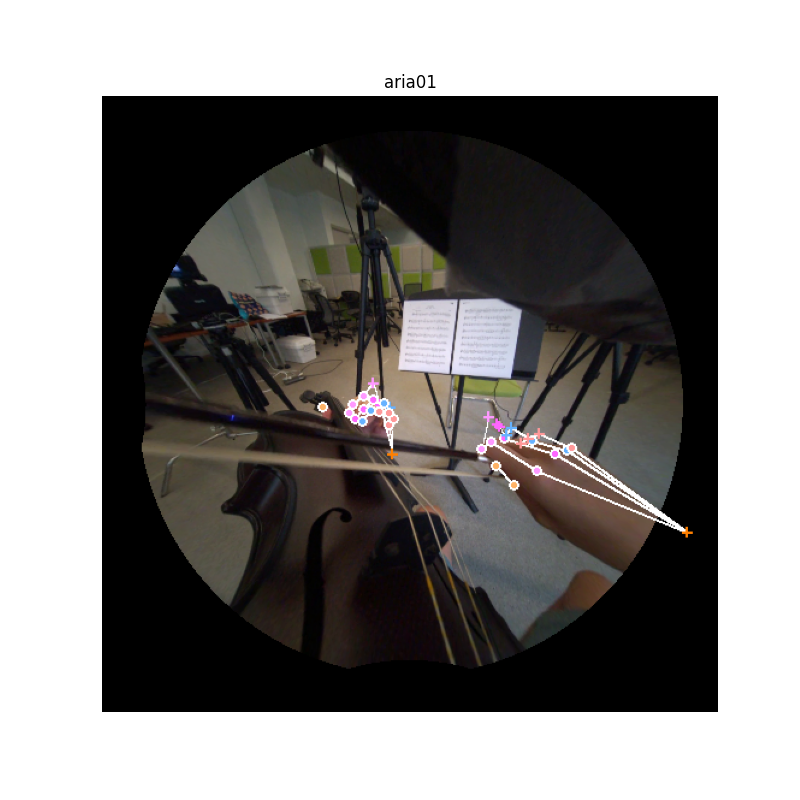
3.1 load 2D hand pose annotation and overlay it on undistorted egocentric frame
annotation_type = "hand" # annotation_type should be body or hand.
# get hands meta data
keypoints_map, skeleton, pose_kpt_color = get_hands_metadata()
# get hand pose annotation folder
egopose_ann_dir = os.path.join(
annotation_dir, f"ego_pose/train/{annotation_type}/annotation"
)
# get the annotation file of the sampled take
annotation_file_path = os.path.join(egopose_ann_dir, f"{take_uid}.json")
all_annotations = json.load(open(annotation_file_path))
# annotation is a dictionary with frame numbers as keys, we then randomly sample one frame.
frame_idx = random.sample(list(all_annotations.keys()), 1)[0]
annotation = all_annotations[frame_idx][0]
frame_idx = int(frame_idx)
print(f"annotation at sampled frame {frame_idx} is {annotation.keys()}.")
annotation at sampled frame 838 is dict_keys(['annotation3D', 'annotation2D']).
Next we read the corresponding at the sampled frame index from exocentric videos and egocentric video. We store it in a dictionary videos with camera name as key.
base_directory = os.path.join(release_dir, take["root_dir"])
videos = {}
for cam_name in all_cams:
if cam_name in exo_cam_names:
stream_name = '0'
else:
stream_name = 'rgb'
local_path = os.path.join(base_directory, take['frame_aligned_videos'][cam_name][stream_name]['relative_path'])
videos[cam_name] = get_frame(local_path, frame_idx)
Now let's visualize the 2D annotations on the undistorted aria frame.
ego_local_path = os.path.join(base_directory, take['frame_aligned_videos'][ego_cam_name]['rgb']['relative_path'])
ego_frame = videos[ego_cam_name]
cam_name = ego_cam_name
ann = annotation["annotation2D"][ego_cam_name]
img = ego_frame
img = img.rotate(90)
image_array = np.asarray(img)
rectified_array, principal_points, focal_lengths = undistort_aria(image_array, vrs_data_provider, "camera-rgb", 150, 512)
undistorted_frame = Image.fromarray(rectified_array, "RGB")
viz_img = get_viz(undistorted_frame, keypoints_map, ann, skeleton, pose_kpt_color, annot_type=annotation_type, is_aria=True)
# uncomment the following lines to show the result
# plt.figure(figsize=(8, 8))
# plt.imshow(viz_img.rotate(270))
# plt.axis("off") # Hide the axes ticks
# plt.title(f"{cam_name}")
# plt.show()
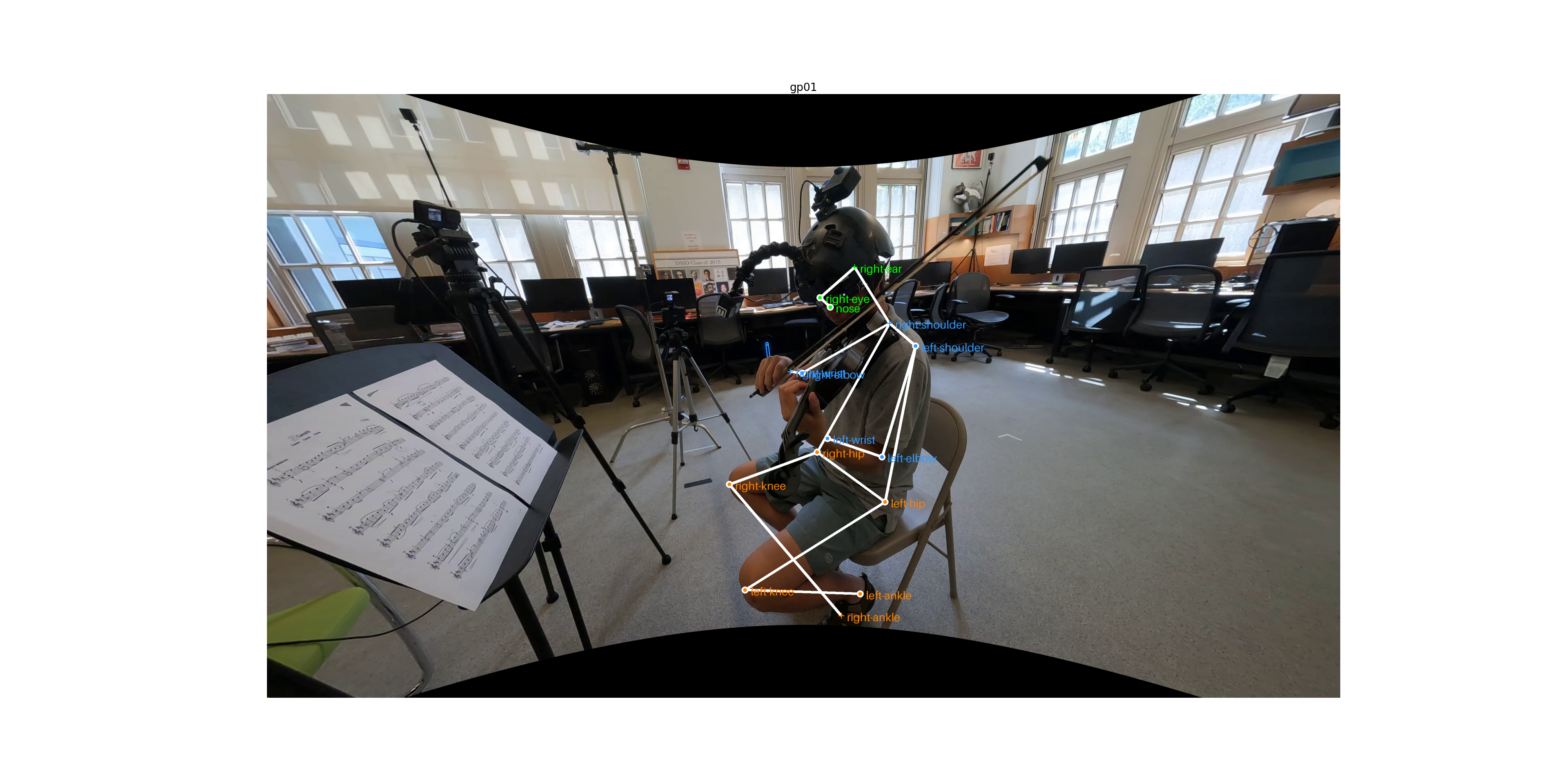
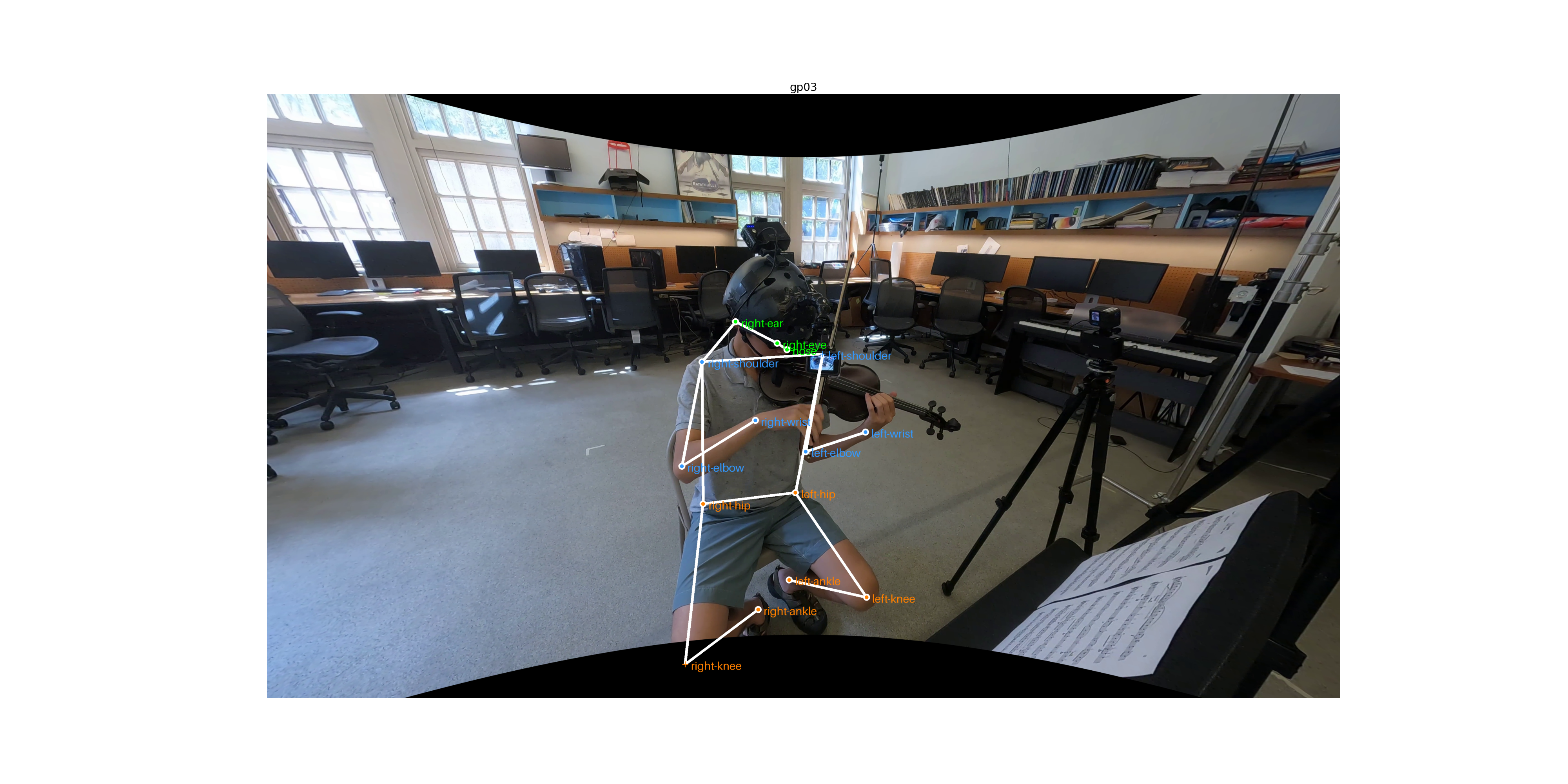
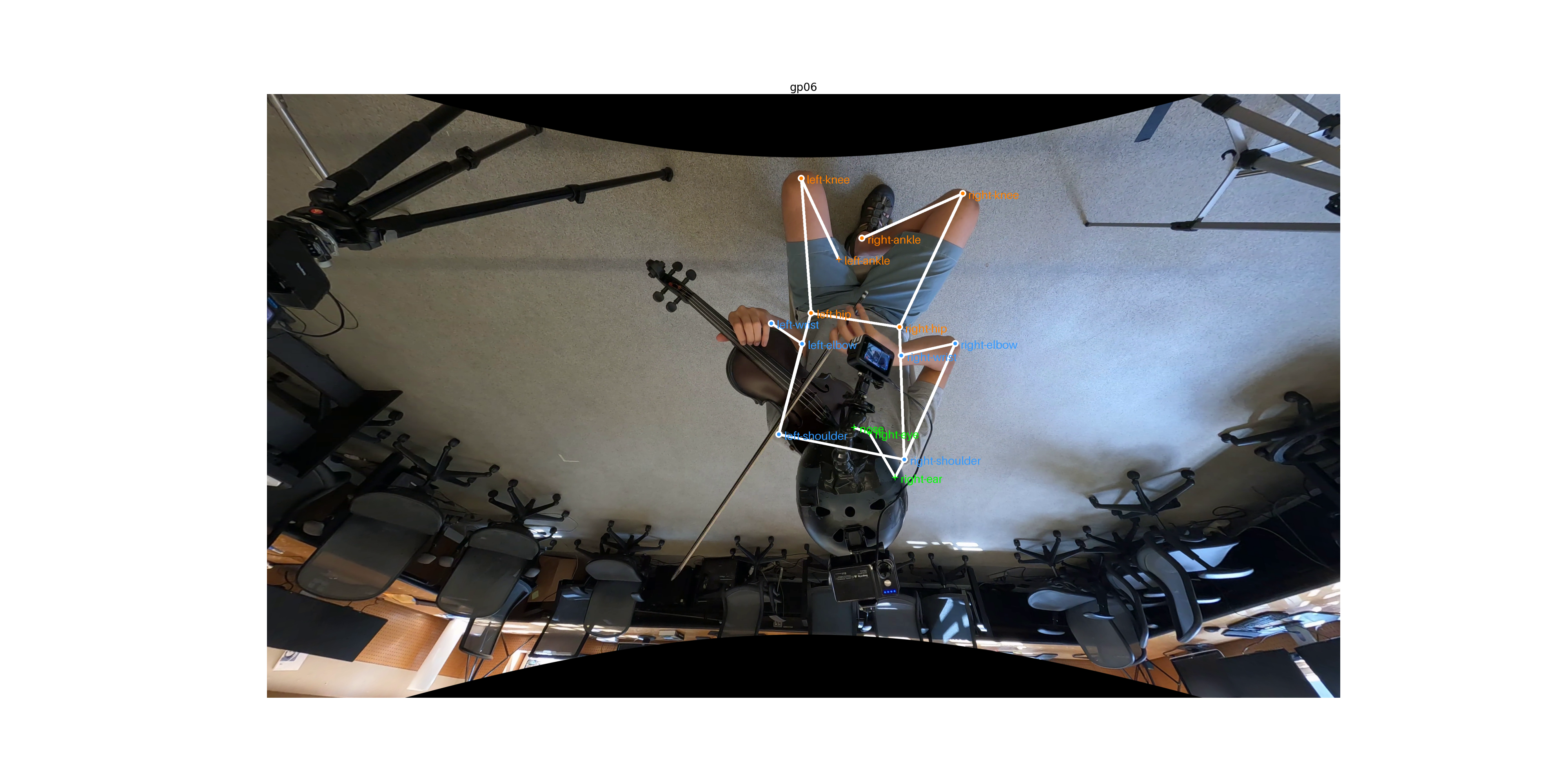
3.2 load 2D body pose annotation and overlay it on undistorted exocentric frames
annotation_type = "body"
keypoints_map, skeleton, pose_kpt_color = get_body_metadata()
# get body pose annotation folder
egopose_ann_dir = os.path.join(
annotation_dir, f"ego_pose/train/{annotation_type}/annotation"
)
# get the annotation file of the sampled take
annotation_file_path = os.path.join(egopose_ann_dir, f"{take_uid}.json")
all_annotations = json.load(open(annotation_file_path))
annotation = all_annotations[str(frame_idx)][0]
frame_idx = int(frame_idx)
print(f"annotation at sampled frame {frame_idx} is {annotation.keys()}.")
annotation at sampled frame 838 is dict_keys(['annotation3D', 'annotation2D']).
We load the frames from all exocentric cameras, and overlay the body pose annotation on them.
results = {}
for cam_name in exo_cam_names:
annot_2d = annotation["annotation2D"]
if cam_name not in annot_2d:
continue
calib_df = exo_traj_df[exo_traj_df.cam_uid == cam_name]
calib_df = calib_df.iloc[0].to_dict()
D, I = get_distortion_and_intrinsics(calib_df)
ann = annot_2d[cam_name]
img = videos[cam_name]
undistorted_frame, new_K_latest = undistort_exocam(np.array(img), I, D)
viz_img = get_viz(
Image.fromarray(undistorted_frame),
keypoints_map,
ann,
skeleton,
pose_kpt_color,
annot_type=annotation_type,
)
results[cam_name] = viz_img
# uncomment the following line to display the results
# show_results(results)


Conclusion
In this notebook, we introduce how to undistort the frames from aria and gopro cameras. Instead of projecting 3D pose annotations on the camera frames, we load the 2D hand and body annotations, and overlay them on the undistorted frames.
 If you found this tutorial helpful, consider ⭐-ing our repository.
If you found this tutorial helpful, consider ⭐-ing our repository.
 For any questions, typos, or bugs that you found, please raise an issue on GitHub.
For any questions, typos, or bugs that you found, please raise an issue on GitHub.