EgoPose
EgoPose annotations are now available in V2 and V1 of the dataset.
Download with --parts annotations --benchmarks egopose. You can
also download with --benchmarks handpose or --benchmarks bodypose to filter
just body or hand pose annotations.
EgoPose Annotations
The ground truth of EgoPose is annotated at the timestamp level for each take. At each timestamp with valid annotations, a single set of global 3D keypoints are provided, along with the corresponding 2D keypoints on ego and exo cameras.
Camera metadata for each take including intrinsic and extrinsic matrices are also provided in separate json files. We will describe the details below.
2D/3D Keypoints JSON Structure
For each take, the 2D and 3D keypoints are grouped by the frame number. One can use frame_number as index to query annotations.
Example Usage
import os
import json
dataset_root_dir = "<download_root_dir>"
take_uid = "<take_uid>" # e.g. "80f65504-a37a-4c84-8a19-df3bba123326"
take_json_path = os.path.join(dataset_root_dir, "annotations/ego_pose/train/hand/annotation/", f"{take_uid}.json")
ann_data = json.load(open(take_json_path))
# Example Python code to access 2D annotations for 'cam01' and 'cam02'
cam01_annotations = ann_data['3468'][0]['annotation2D']['cam01']
cam02_annotations = ann_data['3468'][0]['annotation2D']['cam02']
# Example usage of 3D annotations for 'right_middle_2' joint
right_middle_2_3d = ann_data['3468'][0]['annotation3D']['right_middle_2']
JSON Structure
Here is a typical structure for EgoPose
Example:
{
"<frame_number>": [{
"metadata": {
"take_uid": (string),
"take_name": (string),
"frame_number": (int)
},
"annotation2D": {
"cam01":{
"<joint_name>": {
"x": (float),
"y": (float),
"placement": (string)
},
...
},
"cam02":{
"<joint_name>": {
"x": (float),
"y": (float),
"placement": (string)
},
...
},
"cam03":{
"<joint_name>": {
"x": (float),
"y": (float),
"placement": (string)
},
...
},
"cam04":{
"<joint_name>": {
"x": (float),
"y": (float),
"placement": (string)
},
...
},
"aria":{
"<joint_name>": {
"x": (float),
"y": (float),
"placement": (string)
},
...
},
},
"annotation3D": {
"<joint_name>": {
"x": (float),
"y": (float),
"z": (float),
"num_views_for_3d": (int)
},
"<joint_name>": {
"x": (float),
"y": (float),
"z": (float),
"num_views_for_3d": (int)
},
...
}
}],
...
}
Metadata
take_uid(String): Unique identifier for the take.take_name(String): Name of the take.frame_number(Integer): Frame number associated with the data.
2D Annotations
annotation2D(Object): Contains 2D annotations from different cameras and perspectives.cam01tocam04(Object): Annotations from individual cameras. For hand, an additionalariacamera is provided.joint_name(Object): Coordinates and placement information for specific joints.x(Float): X-coordinate.y(Float): Y-coordinate.placement(String): Indicates whether the annotation is manual or auto-generated.
3D Annotations
annotation3D(Object): Contains 3D annotations for specific joints.joint_name(Object): Coordinates in 3D space and the number of views used for 3D annotation.x(Float): Coordinates in 3D space.y(Float): Coordinates in 3D space.z(Float): Coordinates in 3D space.num_views_for_3d(Integer): Number of views considered for 3D annotation.
Joint Names
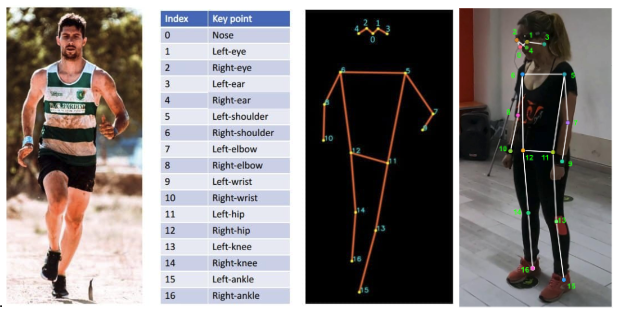
In EgoPose, body and hand are annotated separately. Please refer to seperate json for body and hand individually. The group of joint names adopted in body and hand annotations are:
joint_namefor Body (17 in total):left-shoulder,right-shoulder,left-knee,right-knee,left-elbow,right-elbow,left-eye,right-eye,left-wrist,right-wrist,left-ankle,right-ankle,left-hip,right-hip,left-ear,right-ear,nose
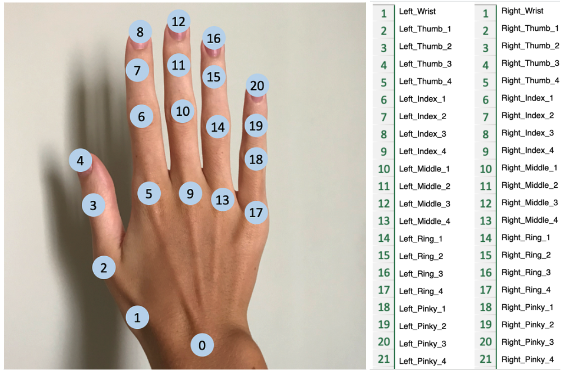
joint_namefor Hand (42 in total, 21 for left hand, 21 for right hand):
left_pinky_1, left_pinky_2, left_pinky_3, left_pinky_4, left_ring_1, left_ring_2, left_ring_3, left_ring_4, left_middle_1, left_middle_2, left_middle_3, left_middle_4, left_index_1, left_index_2, left_index_3, left_index_4, left_thumb_1, left_thumb_2, left_thumb_3, left_thumb_4, left_wrist, right_pinky_1, right_pinky_2, right_pinky_3, right_pinky_4, right_ring_1, right_ring_2, right_ring_3, right_ring_4, right_middle_1, right_middle_2, right_middle_3, right_middle_4, right_index_1, right_index_2, right_index_3, right_index_4, right_thumb_1, right_thumb_2, right_thumb_3, right_thumb_4, right_wrist
Camera Pose JSON Structure
For each take, the corresponding camera pose json contains the necessary information for each timestamp. A typical structure is as below:
Example
{
"<frame_number>": {
"metadata": {
"take_uid": (string),
"take_name": (string),
"frame_number": (int)
},
"aria": {
"camera_intrinsics": [
[
(float),
(float),
(float)
],
[
(float),
(float),
(float)
],
[
(float),
(float),
(float)
]
],
"camera_extrinsics": [
[
(float),
(float),
(float),
(float)
],
[
(float),
(float),
(float),
(float)
],
[
(float),
(float),
(float),
(float)
]
]
},
"cam01": {
"camera_intrinsics": [
[
(float),
(float),
(float)
],
[
(float),
(float),
(float)
],
[
(float),
(float),
(float)
]
],
"camera_extrinsics": [
[
(float),
(float),
(float),
(float)
],
[
(float),
(float),
(float),
(float)
],
[
(float),
(float),
(float),
(float)
]
]
},
"cam02": {
"camera_intrinsics": [
[
(float),
(float),
(float)
],
[
(float),
(float),
(float)
],
[
(float),
(float),
(float)
]
],
"camera_extrinsics": [
[
(float),
(float),
(float),
(float)
],
[
(float),
(float),
(float),
(float)
],
[
(float),
(float),
(float),
(float)
]
]
},
"cam03": {
"camera_intrinsics": [
[
(float),
(float),
(float)
],
[
(float),
(float),
(float)
],
[
(float),
(float),
(float)
]
],
"camera_extrinsics": [
[
(float),
(float),
(float),
(float)
],
[
(float),
(float),
(float),
(float)
],
[
(float),
(float),
(float),
(float)
]
]
},
"cam04": {
"camera_intrinsics": [
[
(float),
(float),
(float)
],
[
(float),
(float),
(float)
],
[
(float),
(float),
(float)
]
],
"camera_extrinsics": [
[
(float),
(float),
(float),
(float)
],
[
(float),
(float),
(float),
(float)
],
[
(float),
(float),
(float),
(float)
]
]
}
},
...
}
Metadata
take_uid(String): Unique identifier for the take.take_name(String): Name of the take.frame_number(Integer): Frame number associated with the data.
Camera Matrices
For each camera, the intrinsic and extrinsic matrices are provided as 3x4 transformation matrices.